
Camera-Augmented C-Arm
In the project Camera Augmented Mobile C-Arm (CAMC) we are aiming to develop intuitive Augmented Reality (AR) visualizations for image-guided surgery.
In the CAMC project, conventional intraoperative X-ray systems are extended by camera and tracking systems to enable intuitive and multimodal augmented reality visualizations.
Mobile c-arms are essential tools in everyday trauma and orthopedic surgeries as many procedures are guided by X-Ray fluoroscopy. Furthermore, intra-operative 3D reconstruction has been introduced with Cone-Beam-Computed Tomography (CBCT). Even if a 3D CT reconstruction is computed offline, often X-Ray fluoroscopy is used as the major interventional image-guided modality. However, the success of the procedure depends on the ability of the surgeon to mentally recreate the spatio-temporal intraoperative situation from two-dimensional fluoroscopic X-Ray images.

In the medical imaging research community, there has been a considerable effort in replacing fluoroscopic guidance with an interactive and intuitive display of 3D reconstructions of the target anatomy. Within the scope of our project, conventional intraoperative c-arm systems are now being extended with a (tracking) camera that is firmly attached to the frame of the device. Through an offline calibration process, we are able to co-register the two modalities. The resulting system enables intuitive augmented reality visualizations. Since the publication of the first concept in 1999 [1], numerous further developments have been proposed, such as the calibration of 2D/3D cameras [2-4], trackers [5] and more recently HMD systems [6]. In the last two decades, our research partners have published more than 60 articles about CAMC research.
Further information about the research project, all publications and a historic outline of the project including a presentation of selected papers can be found on Medical Augmented Reality.
In our current research project, we developed a novel radiation-free concept to calibrate a tracker to the c-arm gantry. [7] By using a tracking system, the center of rotation of the c-arm can be determined by analyzing the mechanical configuration of the X-ray system. As shown in the video, trajectories during the rotation of the mobile C-arm system around its main axes are independently recorded. These trajectories span the surface of a spindle torus whose mathematical formulation describes the rotation center of the system. By decomposing this 3D fitting problem into two-dimensional subproblems, the recorded trajectories can be used to determine the position and orientation of the center of rotation, which is crucial for the spatial localization of X-ray images and the reconstruction of 3D volumes of the patient's anatomy. The result of this offline calibration can be applied to provide intuitive AR applications in orthopedic surgery.
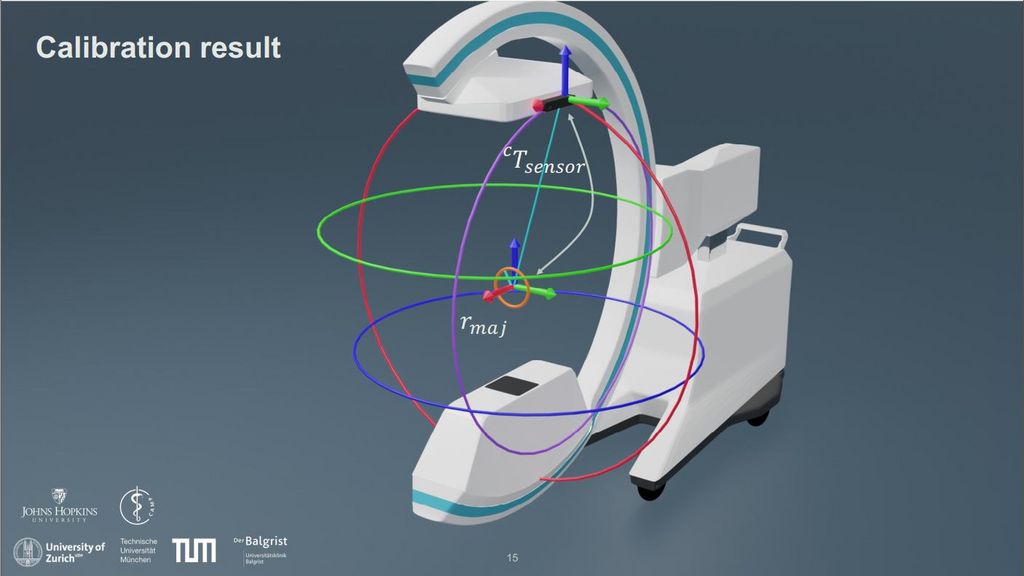
References
1. Navab, N., Bani-Kashemi, A., and Mitschke, M., “Merging visible and invisible: Two camera-augmentedmobile c-arm (camc) applications,”IWAR’99, 134–141, IEEE (1999).
2. Habert, S., Gardiazabal, J., Fallavollita, P., and Navab, N., “Rgbdx: first design and experimental validationof a mirror-based rgbd x-ray imaging system,”ISMAR’15, 13–18, IEEE (2015).
3. Albiol, F., Corbi, A., and Albiol, A., “Geometrical calibration of x-ray imaging with rgb cameras for 3dreconstruction,”IEEE Transactions on Medical Imaging35(8), 1952–1961 (2016).
4. Lee, S. C., Fuerst, B., Fotouhi, J., Fischer, M., Osgood, G., and Navab, N., “Calibration of rgbd camera andcone-beam ct for 3d intra-operative mixed reality visualization,”IJCAR’1611(6), 967–975 (2016).
5. Reaungamornrat, S., Otake, Y., Uneri, A., Schafer, S., Mirota, D., Nithiananthan, S., Stayman, J., Kleinszig,G., Khanna, A., Taylor, R., and Siewerdsen, J., “An on-board surgical tracking and video augmentationsystem for c-arm image guidance,”IJCAR’127(4), 647–665 (2012).
6. Fotouhi, J., Unberath, M., Song, T., Gu, W., Johnson, A., Osgood, G., Armand, M., and Navab, N.,“Interactive flying frustums (iffs): spatially aware surgical data visualization,”IJCAR’1914(6) (2019)
7. Lee, S.C., Seibold, M., Fürnstahl, P., Farshad, M., Navab, N., "Pivot calibration concept for sensor attached mobile c-arms", Proceedings Volume 11315, Medical Imaging 2020: Image-Guided Procedures, Robotic Interventions, and Modeling; 1131503 (2020)
Project Team & Cooperations

Weitere Projekte
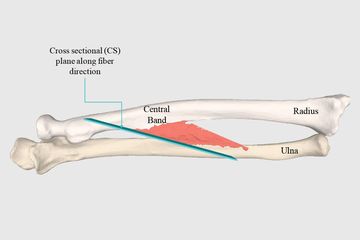
Analysis of movement in the distal radioulnar joint before and after surgery

Application for image annotation for machine learning algorithms for object recognition
Establishment of a centre for computer-assisted orthopaedic surgery